Table des matières
Cet exemple correspond au fichier
Physics/pde.xml du sous-répertoire
examples du répertoire d'installation de
XMLlab.
L'équation de Poisson a pour but de simuler un potentiel électrique. Elle est un cas particulier de l'équation de Laplace, qui est la suivante :
avec deux types de conditions aux limites :
robin :
dirichlet :
sachant que le domaine Ω a pour frontière Γ = Γ0 ∪ Γ1 ∪ ... Γi ∪ ... Γn.
L’exemple que nous nous proposons de traiter correspond au domaine Ω suivant, qui a pour frontière Γ = Γ0 ∪ Γ1 ∪ Γ2.
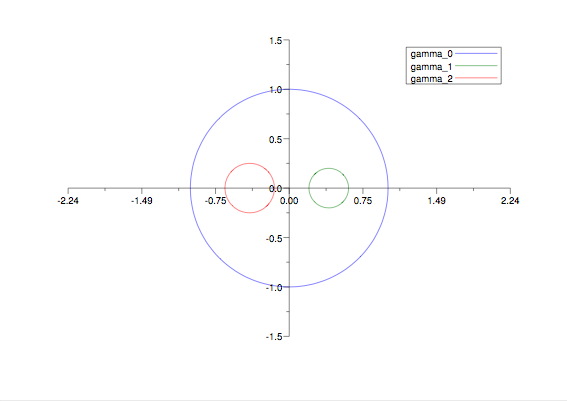
La convention étant que l’intérieur du domaine se trouve toujours à gauche de la courbe quand le paramètre augmente (ici θ). On a donc ici deux trous. On discrétisera Γ0 avec 2n points et Γ1, Γ2 avec n points.
L’équation de Poisson concernant notre simulation est finalement la suivante :
avec