Nous allons montrer comment se traduit cette simulation en un
fichier XML que l'outil XMLlab va utiliser pour
générer une simulation exécutée par Scilab. Le
fichier XML sera montré sous sa forme textuelle, et parfois également
tel qu'il apparaît lors de son édition avec le logiciel
XMLMind XML Editor (xxe, cf.
http://www.xmlmind.com/xmleditor/). Un tel logiciel permet
une bonne visualisation de la structure d'un fichier XML, ainsi que sa
modification facilitée par le fait qu'il présente en permanence
l'ensemble des balises qui peuvent être ajoutées à chaque endroit, ainsi
que l'ensemble des attributs d'une balise donnée, avec le cas échant
leurs différentes valeurs admises.
Les deux premières lignes du fichier permettent d'associer la DTD de XMLlab au fichier XML et sont identiques pour toute simulation. Elles ne devront être modifiées que lors d'une mise à jour de XMLlab impliquant une évolution de la DTD (ici en version 1.4).
<?xml version="1.0" encoding="ISO-8859-1"?> <!DOCTYPE simulation PUBLIC "-//UTC//DTD XMLlab V1.4//FR" "http://www.xmllab.org/dtd/1.4/simulation.dtd">
Les lignes suivantes permettent de spécifier le titre de la simulation, son auteur, ainsi que des mots-clefs qui lui sont relatifs :
<simulation>
<header>
<title>Pendule</title>
<author>Please set author's name</author>
<keywords>simulation,scilab,xml</keywords>
</header>
...
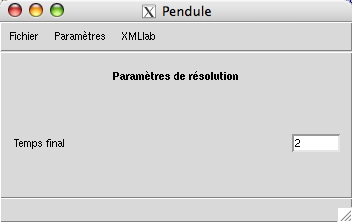
</simulation> Les paramètres de la simulation peuvent être groupés en plusieurs sections, chaque section donnant lieu à une entrée différente du menu de la simulation, comme le montre la figure suivante :
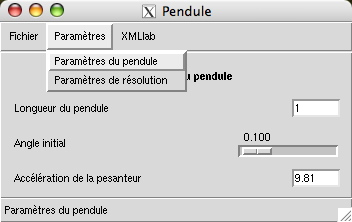
Le choix d'une entrée provoque alors l'affichage dans la fenêtre des paramètres correspondant. Les lignes suivantes introduisent et nomment les sections de paramètres :
<parameters>
<section>
<title>Paramètres du pendule</title>
...
</section>
<section>
<title>Paramètres de résolution</title>
...
</section>
</parameters>Nous allons maintenant décrire en détail la déclaration des
paramètres de chaque section, dont les lignes correspondantes figurent
après la balise <title> en question :
Paramètres du pendule : les lignes suivantes décrivent chacun de ces paramètres dont la saisie est effectuée dans la fenêtre illustrée par la Figure 3.2, « Entrées du menu de la simulation du pendule » :
Longueur L du pendule :
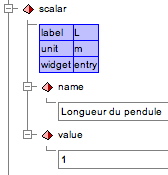
<scalar label="L" unit="m" widget="entry"> <name>Longueur du pendule</name> <value>1</value> </scalar>Le paramètre est saisi via un champ de texte et sa valeur initiale est 1. L'attribut
labelsert à fait référence à ce paramètre dans la suite (L).Angle initial
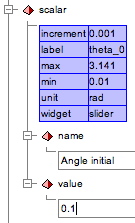
<scalar increment="0.001" label="theta_0" max="3.141" min="0.01" unit="rad" widget="slider"> <name>Angle initial</name> <value>0.1</value> </scalar>La valeur du paramètre est réglable via une glissière allant de 0.01 à 3.141 et réglable à 0.001 près. Il y est fait référence via le
labeltheta_0.Accélération de la pesanteur g :
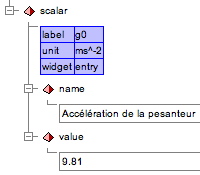
<scalar label="g0" unit="ms^-2" widget="entry"> <name>Accélération de la pesanteur</name> <value>9.81</value> </scalar>Le paramètre est saisi via un champ de texte et sa valeur initiale est 9.81. Il y est fait référence via le
labelg0.
Paramètres de résolution : les lignes suivantes décrivent chacun de ces paramètres dont la saisie est effectuée dans la fenêtre illustrée par la figure suivante :
Borne supérieure
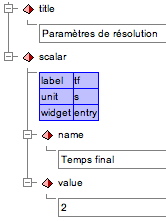
<scalar label="tf" unit="s" widget="entry"> <name>Temps final</name> <value>2</value> </scalar>Le paramètre est saisi via un champ de texte et sa valeur initiale est 2. Il y est fait référence via le
labeltf.
Cette section - qui suit la balise
</parameters> - permet de définir les équations à
résoudre, les courbes à calculer, ainsi que les domaines de valeurs
(1d ou 2d) que certaines variables doivent prendre. Ces différentes
définitions sont encadrées par les balises suivantes :
<compute> ... </compute>
Pour ce qui est de notre problème du pendule, les éléments suivants y sont définis :
Définition de la variable d'intégration et de son intervalle de discrétisation
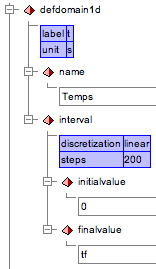
<defdomain1d label="t" unit="s"> <name>Temps</name> <interval discretization="linear" steps="200"> <initialvalue>0</initialvalue> <finalvalue>tf</finalvalue> </interval> </defdomain1d>Il est indiqué que l'intervalle
labelt.Définition de l’élément
ode(ordinary differential equation) regroupant la référence à la variable d'intégration et à son domaine de variation, la définition des états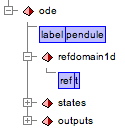
<ode label="pendule"> <refdomain1d ref="t"/> <states> ... </states> <outputs> ... </outputs> </ode>Vue d'ensemble de l’élément
odeet de l'élémentrefdomain1ddéfinissant la référence à la variable d'intégrationt.Elément
statesdéfinissant les états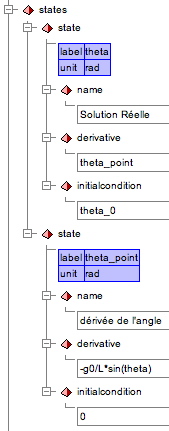
<states> <state label="theta" unit="rad"> <name>Solution Réelle</name> <derivative>theta_point</derivative> <initialcondition>theta_0</initialcondition> </state> <state label="theta_point" unit="rad"> <name>dérivée de l'angle</name> <derivative>-g0/L*sin(theta)</derivative> <initialcondition>0</initialcondition> </state> </states>Les états
thetaettheta_pointsont définis, avec pour chacun d'eux la dérivée (fonction des autres états) et la valeur initiale prise pour la valeur initiale de la variable d'intégrationt.Elément
outputsdéfinissant comme seule sortie la fonction donnant la solution linéarisée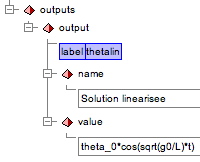
<outputs> <output label="thetalin"> <name>Solution linearisee</name> <value>theta_0*cos(sqrt(g0/L)*t)</value> </output> </outputs>La fonction de la solution linéarisée est identifiée par le label
thetalin.
Cette section - qui suit la balise </compute>
- permet de définir les différentes fenêtres graphiques, un ensemble
de système d'axes pour chacune d'elle (les fenêtres pouvant alors se
diviser horizontalement ou verticalement pour les contenir), ainsi que
les courbes qui doivent être respectivement affichées dans chaque
système d'axe. Ces différentes définitions sont encadrées par les
balises suivantes :
<display> ... </display>
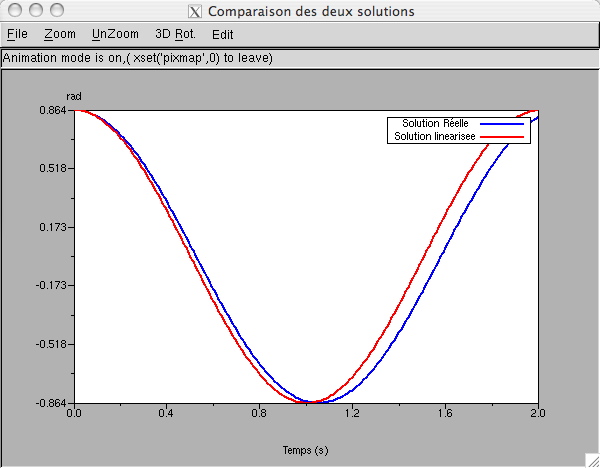
Dans notre cas, une seule fenêtre comprend une système d'axe cartésien contenant les courbes des solutions réelles et linéarisées :
Définition de la fenêtre :
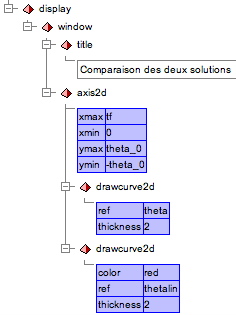
<window> <title>Comparaison des deux solutions</title> <axis2d xmax="tf" xmin="0" ymax="theta_0" ymin="-theta_0"> <drawcurve2d color="auto" ref="theta" thickness="2" /> <drawcurve2d color="red" ref="thetalin" thickness="2" /> </axis2d> </window>Le titre de la fenêtre est indiqué, laquelle comprend un système d'axe cartésien 2D, x variant de 0 à
theta) et celle de la solution linéarisée (sortiethetalin).
On obtient ainsi les courbes suivantes :